

成像色度计
ProMetric® I


X

C-HUD、W-HUD和AR-HUD。
虚像距离,虚像尺寸以及畸变情况等针对视觉缺陷的项目。
可采用ISO 12233斜边法来测量调制传递函数MTF。
可遵循美国汽车工程师学会(SAE)J1757-2_201811标准中的要求。
|
对于HUD产品,虽然现今已从成像面积小,成像距离近的C-HUD发展到更为先进的AR-HUD,但仍然存在诸如亮度不够,颜色偏离,清晰度与对比度差,产生畸变与鬼影等问题。所以现阶段根据SAE J1757-2(“车载显示器标准测量方法”)和 ISO15008(“道路车辆—运输信息和控制系统的人体工程学方面—车载视觉呈现的规范和测试程序”)标准上的要求对HUD产品进行测试就显得尤为重要。 |
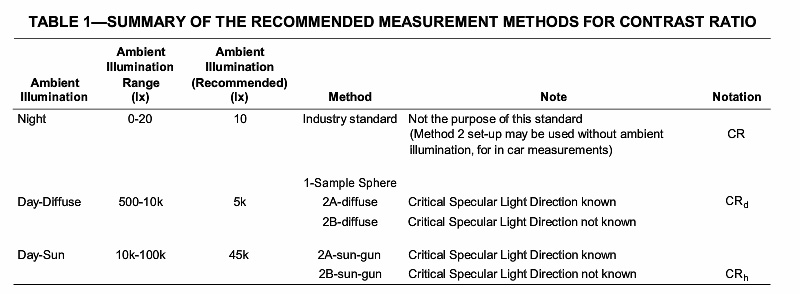
在环境光照度小于50lx的照明环境下,使用HUD光机投影测试画面,使用 Prometric®成像式色度计测量白画面亮度L[dark,w]和黑画面亮度L[dark,k],计算对比度CR=L(information)/L(background)(中心点亮度)。布点测量各点亮度,并计算不均匀性LNUbk和LNUw,计算LNU=[(Lmax - Lmin)/Lmax]x100%,每个测量点至少应该覆盖到25个像素。
HUD对比度推荐测量方法概要 |
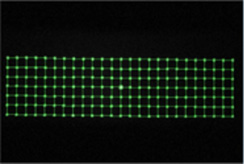
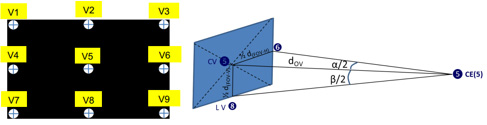
HUD投影上图标准测试画面,分别测量V1和V3,V4和V6,V7和V9之间的距离,求平均值dFOV-H,计算水平视场角α,α/2 = Arctan [(dFOV-H/dOV)/2];分别测量V1和V7, V2和V8, V3和V9之间的距离,求平均值dFov-V,计算垂直视场角β,β/2 = Arctan [(dFOV-V/dOV)/2] |
水平视场角测量画面及垂直视场角测试示例 |
用HUD投影标准测试画面(9点图),在标定面板上定位点V2,V5和V8,或者使用相机里面的数字数据,计算点V5到线段V2V8间的距离Dh5,同样的方式计算点V4到线段V1V7和点V6到线段V3V9间的距离Dh4,Dh6,计算平均水平畸变度:Dht=Avg{Dh4, Dh5, Dh6},计算最大水平畸变度:Dhmt=Max{Dh4, Dh5, Dh6} |
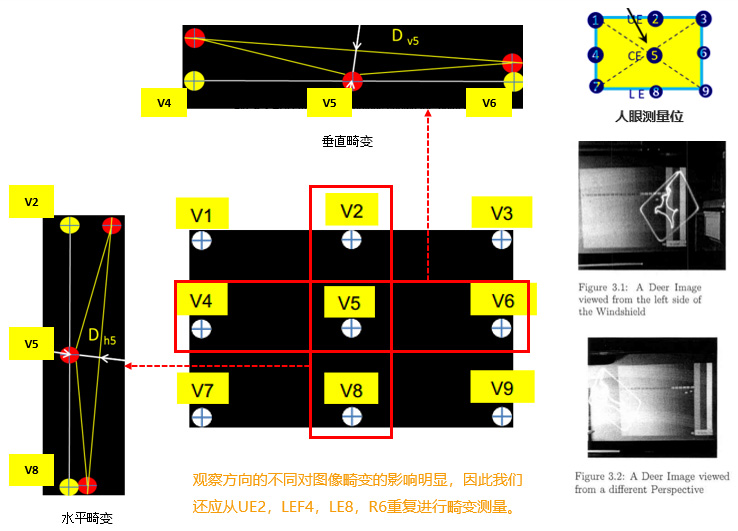
水平与垂直畸变测量示例 |
|
配合专为HUD测试而设计的TT-HUD™软件测试套件TrueTest软件可与任何ProMetric®成像色度计或亮度计搭配使用,为亮度和色度测量或机器视觉创建完整测试系统。TrueTest软件TT-HUD™模块提供一个测试套件可以高效地执行亮度色度和尺寸测量,用于评估平视显示器(HUD)等系统发射的增强投影的质量。
TT-HUD™软件模块包括:
|
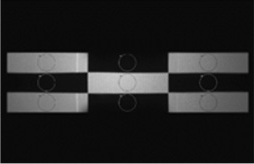
利用“畸变点状网格”测量畸变,利用“棋盘格对比度”以测试对比度,调制传递函数(MTF)线对算法 |

|
我们能为你提供什么帮助?对我们的产品与解决方案感兴趣,向我们经验丰富的工程师提问,获取更多支持。 联系我们 |